Face detection and tracking with Arduino and OpenCV
UPDATES
This guide will also be maintained on my blog http://techbitar.blogspot.com/2012/04/face-detection-and-tracking-with.html INTRODUCTION In this project I have assembled a face detection and tracking system. You can see the video of the final project here Basically, the webcam sends video frames to OpenCV running on a Windows PC. If OpenCV detects a face it will track it and calculate its center's X,Y coordinates. The coordinates are then passed on to the Arduino via a serial USB connection. The Arduino controls the movement of the webcam with the help of two pan/tilt servos to follow the detected face.
OpenCV (Open Source Computer Vision Library: http://opencv.willowgarage.com/wiki/) is an open-source library that includes several hundreds of real-time computer vision algorithms. The OpenCV 2.x library is a C++ API. This is an integration project between hardware and software tools. The image processing C++ code samples are provided with the openCV library and all I did was to modify the sample code for this project. I removed some of the unnecessary code and added serial communications to it so it can send X,Y values to Arduino. CREDIT This project would not have been possible without the team who developed OpenCV. I also benefited from Ryan Owens' tutorial (http://www.sparkfun.com/tutorials/304) which is based on Processing, OpenFrameworks, and an earlier version of OpenCV. I tried to install Processing and OpenFrameworks with no luck. So Instead, I opted for Microsoft Visual C++ 2010 Express and the latest version of OpenCV which is 2.3.1 without any middleware or wrappers. TOOLS Software Required Arduino IDE 1.0 for Windows OpenCV 2.3.1 SuperPack For Windows Microsoft Visual C++ 2010 Express SP1 Serial C++ Library for Win32 (by Thierry Schneider) Code Required - OpenCV C++ (attached) techbitarFaceDetection.cpp (based on OpenCV's example facedetect.cpp) - Arduino's (attached) cam_servo.ino (based on Ryan Owens' example SerialServoControl.pde) Hardware Required - PC preferably running Windows 7 SP1. The faster CPU the better. - Arduino Uno or compatible + power source. - Standard servos X 2. - Webcam w/UBS interface. - Breadboard. - Jumper wires. - Hobby wire to tie pan/tilt servos and webcam together.
Installation and integration issues1) Download and install the OpenCV-2.3.1-win-superpack.exe if you don't wish to deal with generating the support files yourself. Everything you need from OpenCV to build this project has already been generated in this download.
http://sourceforge.net/projects/opencvlibrary/files/opencv-win/2.3.1/ 2) Download and install Microsoft Visual C++ 2010 Express http://www.microsoft.com/visualstudio/en-us/products/2010-editions/visual-cpp-express The OpenCV installation documentation explains how to make Visual C++ aware of the OpenCV support files (include, bin, etc). This is not a one-click job. Careful attention must be given to how Visual C++ must be configured to recognize OpenCV files. The OpenCV team tested version 2.3.1 and Visual C++ 2010 on Windows 7 SP1. If you are using a different configuration, be prepared for a few hiccups. Attach servos and camera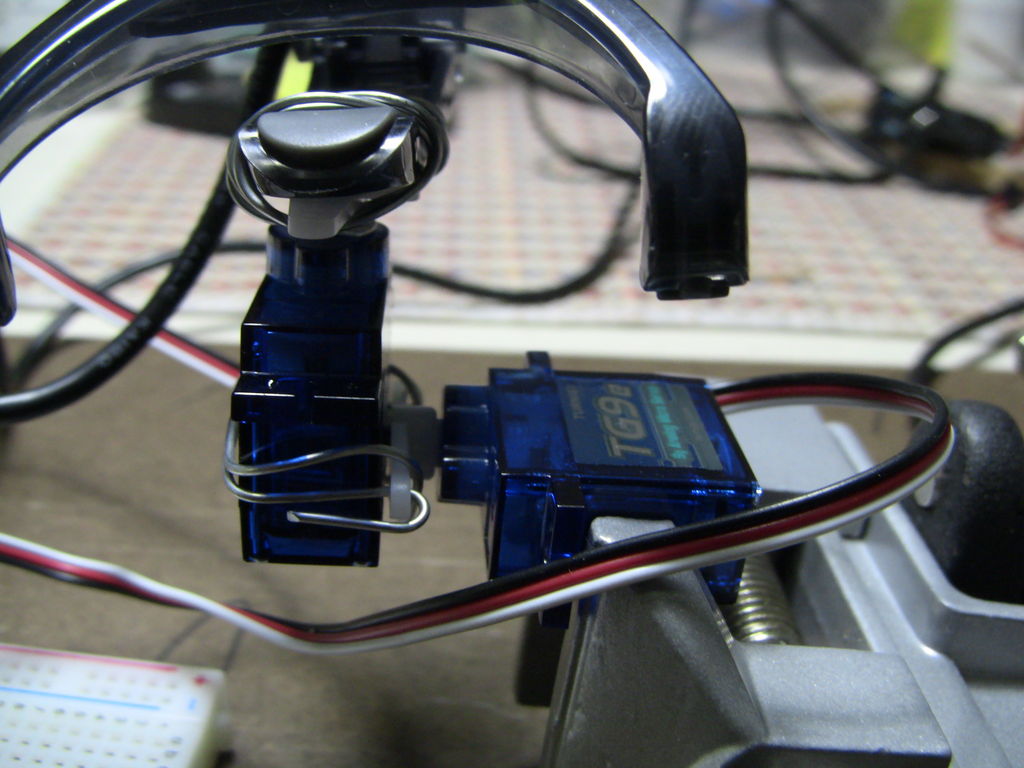
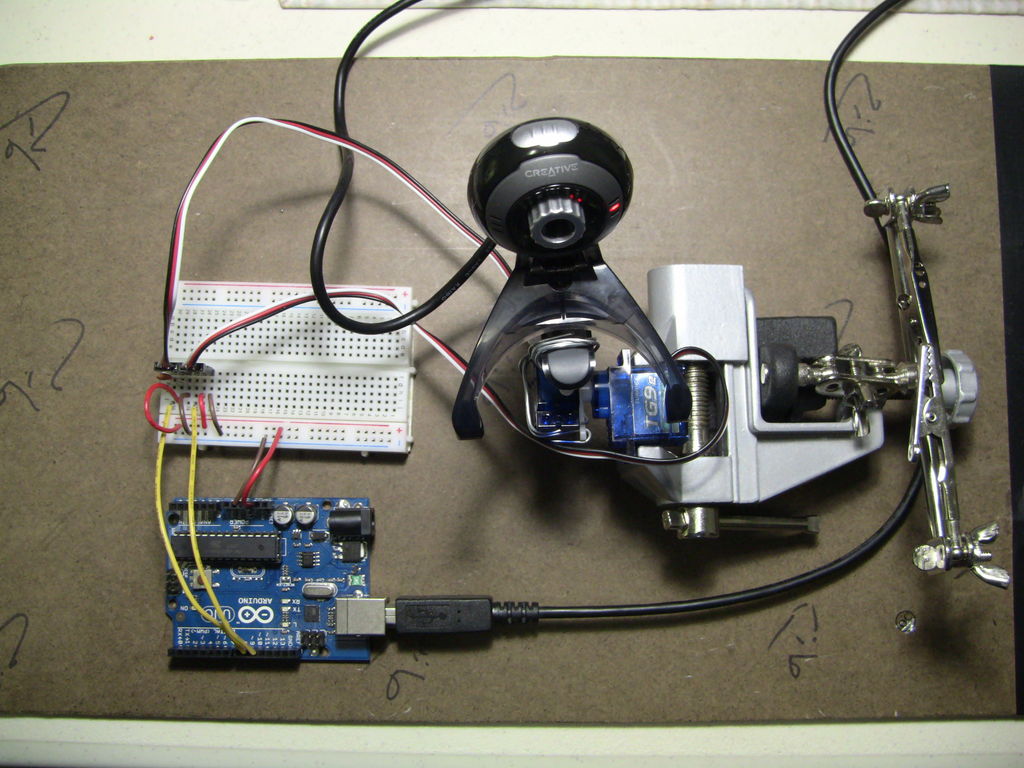
I did not want to affix any of the project parts permanently because I like to take my projects apart after I am done. So I used hobby wire, which is nothing more than a stiff wire, to tie the servos and the webcam together.
I wrapped the base of the webcam to the pan servo horn. Then I wrapped a cable around the horn of the tilt servo and the body of the pan servo. To keep the whole servo/webcam assembly from moving randomly during operation, I used a clamp to tie it down to the soldering helping hands. It kept is steady during servo rotation. It ain't pretty but it works. Wiring the parts together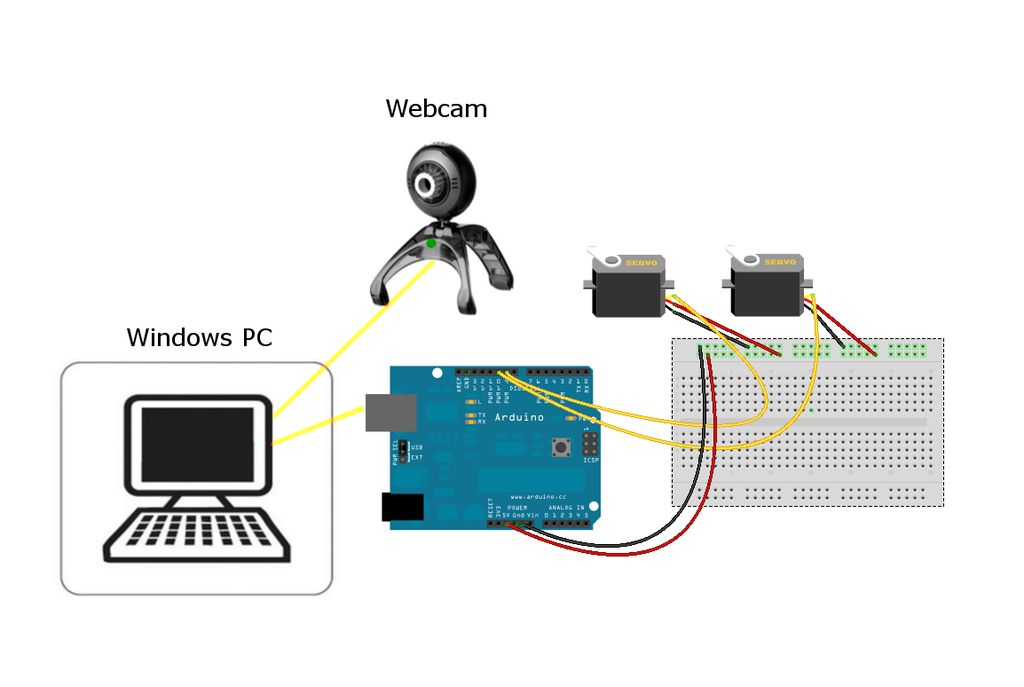
The wiring is straight forward. I used a breadboard to make the connections.
SERVOS The yellow/signal wire for the pan (X axis) servo goes to digital pin 9. The yellow/signal wire for the tilt (y axis) servo goes to digital pin 10. The red/Vcc wires of both servos go to the Arduino's 5V pin. The black/GND wires of both servos go to Arduino's GND pin. WEBCAM The webcam's USB goes to the PC. The C++ code will identify it via a number representing the USB port its connected to. . ARDUINO The Arduino Uno is connected to the PC via USB. Take note of the COM port the USB is connected to. You can find the com port from the Arduino Tools/Serial Ports menu. You will see a check mark next to the active USB port. This is the com port that you will use in your C++ code to communicate with Arduino. You must change the C++ code to match the PC's com port and baud rate with Arduino's. Also, the C++ code must be told which USB port the webcam is using. ResourcesI found these websites to be informative:
OpenCV Face Detection/Tracking Guides Face Tracking with a Pan/Tilt Servo Bracket by zagGrad http://www.sparkfun.com/tutorials/304 Arduino + Servo + openCV Tutorial [openFrameworks] http://www.creativeapplications.net/tutorials/arduino-servo-opencv-tutorial-openframeworks OpenCV & Microsoft Visual C++ Integration OpenCV 2.3.1 and Visual Studio 2010 http://www.deveature.com/2011/11/24/opencv-2-3-1-and-visual-studio-2010/ Getting Started with OpenCV 2.3 in Microsoft Visual Studio 2010 in Windows http://siddhantahuja.wordpress.com/2011/07/18/getting-started-with-opencv-2-3-in-microsoft-visual-studio-2010-in-windows-7-64-bit OpenCV 2.1.0 with Visual Studio 2010 http://blog.aguskurniawan.net/post/OpenCV-210-with-Visual-Studio-2010.aspx How to build applications with OpenCV inside the Microsoft Visual Studio http://opencv.itseez.com/doc/tutorials/introduction/windows_visual_studio_Opencv/windows_visual_studio_Opencv.html Using OpenCV 2.3.1 with Visual Studio 2010 (tutorial) http://www.anlak.com/using-opencv-2-3-1-with-visual-studio-2010-tutorial Enjoy, Hazim Bitar (TechBitar at gmail dot com) |
Created: Dec 9, 2011
| ||||
